A team of mechanical engineers at Nanyang Technological University in Singapore has found a way to electronically control cockroaches without injuring them. In their paper published in the journal npj Flexible Electronics, the group describes the new technology they used to remotely control the cockroaches and the benefits of doing so.
Prior research teams have created a variety of cyborg cockroaches, but they all had one feature in common—they all involved attaching probes to the insect’s nervous system—procedures that led to damage to the insect, and likely some degree of pain.
In this new effort, the researchers noted that damaging cockroaches during attempts to control them results in a very short life expectancy, which then results in very little payoff for a lot of work. They also suggest such research is unethical because of the pain inflicted on the cockroaches. In this new effort, they have found a way to control cockroaches that does not involve cutting into them, resulting in a much longer lifespan.
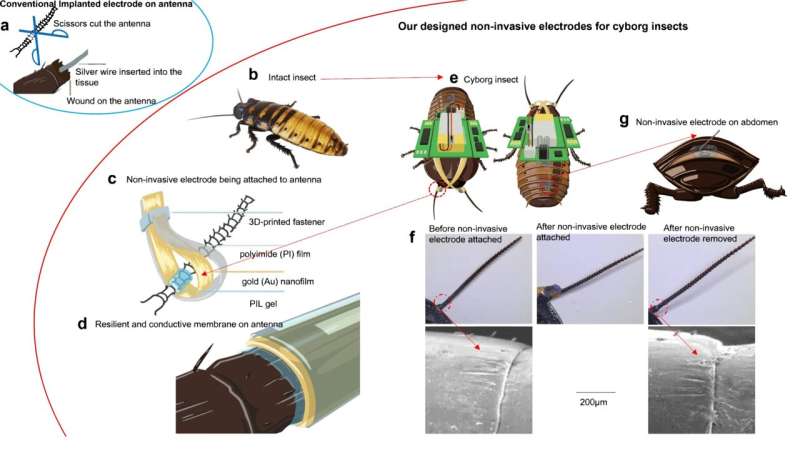
Noting that prior research had suggested that cockroaches could be coaxed into turning by stimulating one or the other of their antennae, the research team found a way to attach cuffs to each of them that do not cause damage. They created a sleeve that fits individually over each antenna. The sleeve is made of gold and plastic printed in layers. Fixed in place by a blast of ultraviolet light, the sleeves shrink like plastic shrink-wrap.
Both sleeves were connected by a short wire to a tiny backpack that was glued to the back of the cockroach. Signals were sent wirelessly to the backpack from a hand controller, which sent very gentle electric jolts to one antenna or the other, resulting in the cockroach turning in a desired direction. The research team also glued an electrode to the cockroach’s belly, that when stimulated in just the right way, made the cockroach run faster or slower.
The researchers tested their cockroach cyborg by having it run around a tiny S-shaped track and also by having it navigate an obstacle course created by placing stones on a flat base in random places. In so doing, they found they could get their cyborg to go where they wanted, when they wanted.